
|
When I made the first production run of 250 units, I was expecting them to last 3-6 months. Instead, they have sold out in under 6 weeks! Thanks to everyone for your trust in this product.
Last week I updated my production test fixture to use some better pogo pins and added new remote communication switching between my central controller and the programming adapter, with the goal of being able to run the whole programming, calibration and test of 10 units in one unattended step. On Thursday I went to my local assembler with my production test fixture and tested the first panel of 10 units from the production line. They were all fine, so I'm expecting to get more units from the new batch of 750 this week. The phone app is a couple of minor bugs in the deployment setup interface away from releasing a new build, which will fix some problems with the deployment setting text file import/export and also increase the Bluetooth transmit power by 4x, for 2x longer range. I'll be doing some experiments this week with a Blue Raven buried in the middle of a carbon fiber airframe tube, as I prep for another 2-stage test flight next weekend. The new phone app build also has some nice-looking diagrams that should help make the accel calibration easiser.
0 Comments
In some applications, the Featherweight GPS tracker won't fit with its standard antenna inside the avionics bay. Like this av-bay for example: 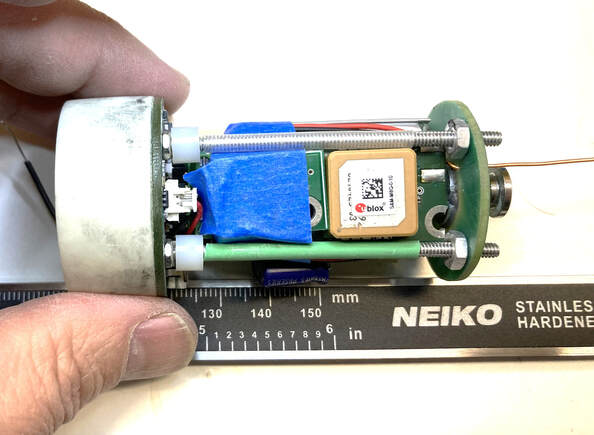 Shown above is an av-bay used in the sustainer of the StratoSpear rocket. Crammed into a 38mm av-bay that's about 2" long is a Blue Raven, GPS tracker, magnetic switch for the tracker, magnetic switch for the Blue Raven, and a battery charger. The Tracker antenna sticks out through a hole in the forward bulkhead and is taped down to the side of rocket's main chute deployment cannon.
I wanted to give this option to customers who don't want to have to remove the SMA antenna connector themselves and solder on their own, so now it's available. The antenna is AWG 22 polyurethane enameled copper wire (magnet wire) that I personally solder on, and then trim to the length that I have found provides the best performance. In short range tests, the link performance is pretty much the same as the standard antenna. 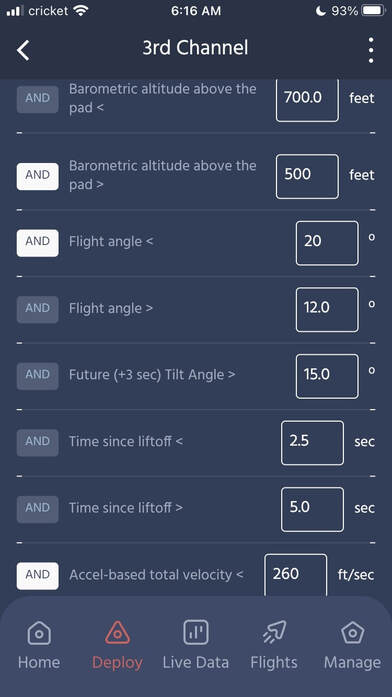 Above is a screen shot from when I was setting up a custom configuration for an airstart on the 3rd channel. The other options are available by scrolling up and down. Click on the "And" to select which flight event to check. 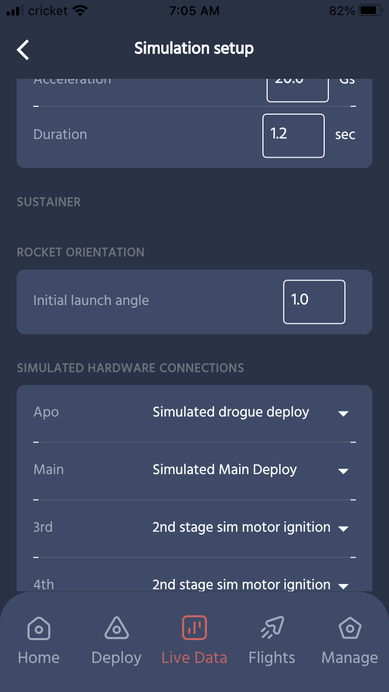 Then I set up a simulation with accelerations and durations that match what I had seen in Open Rocket and RAS Aero. I connected some resistors to the outputs for test purposes (ematches without BP are an even more realistic option). During a Blue Raven flight simulation, the actual deployment settings you selected that are stored in the altimeter are used during the simulated flight, and the outputs really turn on as they would in flight also. In this case, when the apo channel fires, it changes the simulated drag characteristics to be what you would expect for a small drogue or drogueless descent. When the main channel fires, the settings shown above will change the simulated drag so that the terminal velocity is 20-30 feet/second. In my rocket, I have the 3rd and 4th channels connected together for the airstart so that either channel can light the motor. The third channel is set up to fire if the rocket has a straight flight and the speed drops down to my optimal airstart velocity. The 4th channel is set up to fire if the flight has a tilt angle that is in the safe range, but large enough that I want to fire before it gets any worse, even if the velocity is still high. The simulation tested out my flight settings just like I expected. When I set the launch angle to 2 degrees, then the third channel fired first, as expected. I could run the simulation with a larger launch angle to simulate weathercocking of the rocket when it comes out of the tower, and it would show the 4th channel firing first. After a total of about 20 hours of repair, testing and prep over 24 hours, the two-stage version of StratoSpear was back in the tower. 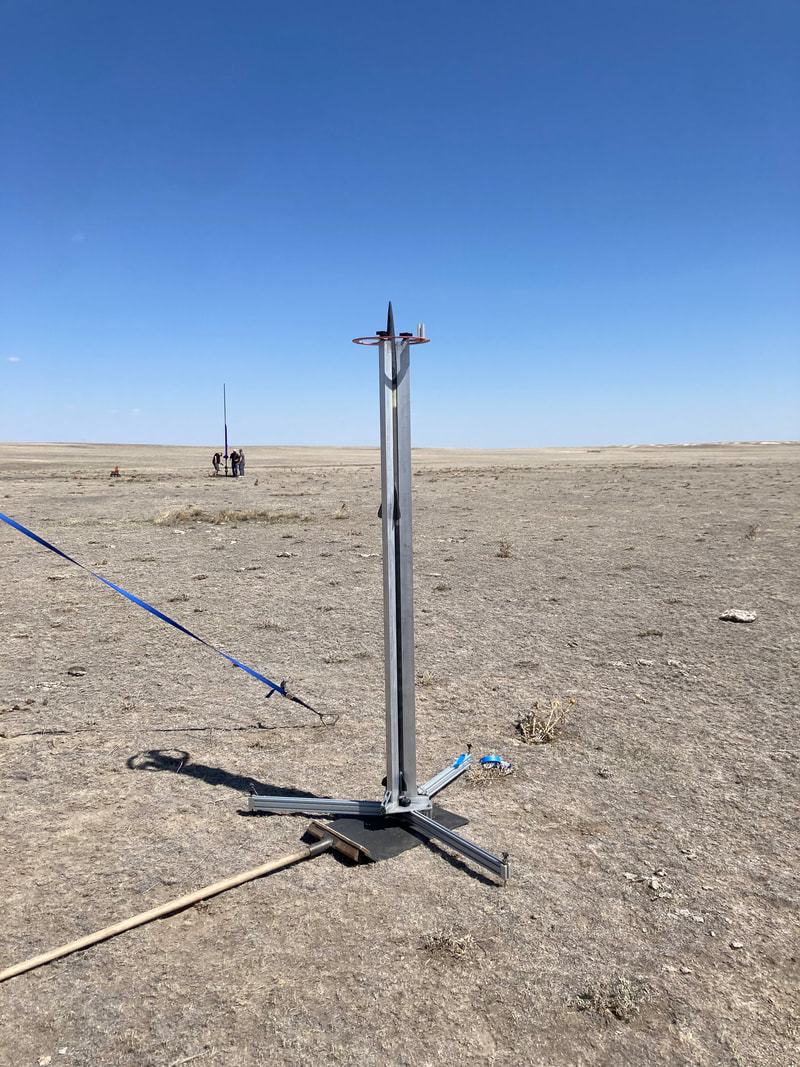 Just in time for flying this weekend, I'm making new phone app builds available for iOS (150) and Android (149). Note that to correctly install this build, you will need to delete the previous version of the app and its data. So screen capture flight summary data if there is a flight you want to save. Going forward, deleting the data will rarely if ever be necessary for future app updates. The main new feature is fixing bugs that often prevented user-modified output deployment settings from being retained. Those have been fixed based on my recent testing. The deployment settings that the Blue Raven used in each flight are saved along with the flight data, and you can save those settings to a file, or review them in the configuration screens. The deployment settings file is a formatted text file that imports directly into Excel. You can modify it if you want and import it back into the Blue Raven program. This will be a great help for reviewing, sharing, and troubleshooting configurations.
A new feature is the accel calibration interface. A nicer graphical interface with diagrams is in work, but for now the interface is functional, and you can re-calibrate your accelerometers by aligning the Blue Raven with each of the 6 axes pointed up, and pressing a button to record each axis. Any axis can be re-recorded if you want to get it a little straighter, but as it is, the record axis button is only enabled when the readings show it's pretty straight. Next up on the feature development list is downloading the low-rate and high-rate data. The data files it will produce are several MBytes to 10s of MBytes in size, and they have to be transferred in Bluetooth packets of 248 bytes or less, so getting this right and getting reasonable throughput makes this among the more challenging of the planned features. For now I'm focused on getting ready for more test flights of the current build on Sunday and I'll dig back into the firmware development next week. Thanks to everyone who has put your trust in this product and made the early sales such a success so far. I was expecting the first production run of 250 units to last for at least 4-6 months, but 145 have been sold since I opened pre-orders on March 24, not including the 10 beta test units and 10 prototypes. So yeah, I'm getting the next production run kicked off ASAP, while doing my best to make sure that nothing breaks on the software side as we add new features to the phone app.
Yesterday I ordered new circuit boards for the next Tracker production run, an update to my Blue Raven production programmer/tester, and the next production run of Blue Ravens. Last night, the Blue Raven production panels, which are nearly identical to the last build, got rejected by the circuit board house for insufficient clearance to the board edges. I'll need to get back with them to see if I can over-ride that check.
In the meantime, I'm doing lots of testing on the new phone app builds, and while there are improvements in some areas, the last new builds have been taken steps backwards in other areas. It's clear I need a systematic regression test plan for releases that are going out into the wild. For now I'm just trying to feed back test results to my developer to get the existing features reliable again. I also need to prep and test a few more panels of Blue Ravens. There are a couple of panels that are close, but need to get their numbering and naming corrected, and use the latest proven firmware build. New Blue Raven features actively getting debugged and tested now:
I saw there was a blog feature available in my Weebly website builder, and I thought this might be a good way to post product development updates. I'll see how it goes.
|
PurposeTo keep customers informed of the latest product development news ArchivesCategories |
 RSS Feed
RSS Feed
Proudly powered by Weebly